

中国科学技术大学研发出高科技机器人手部装置,该装置拥有仿生灵巧手,具备19自由度。这一创新技术的研发将极大提高机器人在复杂环境下的操作能力,推动机器人在生产制造、医疗、救援等领域的应用。该机器人手部装置具有高度的灵活性和精准度,可完成精细操作任务,为机器人技术的发展带来革命性进步。
本文目录导读:
随着科技的飞速发展,机器人技术已成为当今世界的热门话题,仿生灵巧手作为机器人技术的重要组成部分,其研发和应用具有极其重要的意义,中国科学技术大学(中国科大)成功研发出一种具有19自由度的仿生灵巧手,这一技术的突破将为机器人领域带来革命性的变革,本文将详细介绍这一研发成果及其潜在的应用前景。
背景介绍
仿生灵巧手是机器人技术中的重要组成部分,其设计灵感来源于人类手部,一个优秀的仿生灵巧手需要具备高度的灵活性、精确性和协调性,随着材料科学、传感器技术、计算机控制等领域的不断进步,仿生灵巧手的研究和应用逐渐增多,现有的仿生灵巧手在自由度和功能方面仍存在诸多限制,难以满足复杂环境下的应用需求。
中国科大研发成果
针对现有技术的不足,中国科大团队经过多年的研究和实践,成功研发出一种具有19自由度的仿生灵巧手,该灵巧手具备高度灵活的关节和精确的控制能力,能够实现复杂的手势和操作,这一研发成果的特点和优势如下:
1、19自由度设计:该灵巧手具备多个独立关节,能够实现高度灵活的运动,19自由度的设计使得机器人手部可以完成更加精细的操作,如抓取、操作、旋转等。
2、精确控制:通过先进的计算机控制系统和传感器技术,该灵巧手能够实现精确的运动控制,该灵巧手还可以根据环境进行自适应调整,提高操作的稳定性和准确性。
3、高度仿真:该灵巧手的设计灵感来源于人类手部,通过精细的设计和制造,实现了高度仿真的外观和动作,这一特点使得机器人在某些特定场景下能够更好地模拟人类操作。
4、广泛应用:具有19自由度的仿生灵巧手可广泛应用于工业、医疗、农业、服务等领域,在工业生产线上,机器人可以完成高精度的组装和检测任务;在医疗领域,机器人可以辅助医生进行手术操作;在农业领域,机器人可以完成精细的农作物种植和采摘任务。
技术原理
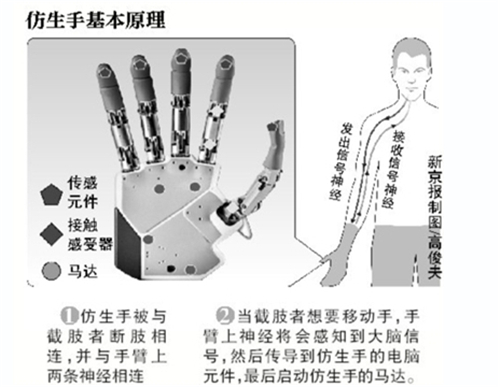
中国科大研发的仿生灵巧手采用了先进的机械结构、传感器技术和计算机控制系统,机械结构是实现高度灵活运动的基础;传感器技术用于实时监测手部运动状态和环境信息,为精确控制提供数据支持;计算机控制系统则负责根据任务需求和环境变化,对灵巧手进行精确控制。

应用案例
1、工业应用:在工业生产线上,具有19自由度的仿生灵巧手可以完成高精度的组装、检测和焊接任务,提高生产效率和产品质量。
2、医疗应用:在手术过程中,机器人医生可以辅助医生进行微创手术、精细手术等操作,提高手术效率和安全性。
3、农业应用:在农作物种植和采摘过程中,仿生灵巧手可以完成精细的播种、施肥、除草和采摘任务,提高农业生产效率。
4、服务领域:在餐饮、旅游等服务行业,仿生灵巧手也可以发挥重要作用,机器人服务员可以为顾客提供精细的服务,如倒茶、上菜等。

前景展望
具有19自由度的仿生灵巧手是中国科大在机器人技术领域的重大突破,随着技术的不断进步和应用需求的增加,未来仿生灵巧手将在更多领域得到广泛应用,随着人工智能技术的发展,仿生灵巧手将实现更高的智能化和自主性,为机器人领域带来革命性的变革,仿生灵巧手的研发还将推动相关产业的发展,如材料科学、传感器技术、计算机控制等,为经济发展和社会进步做出贡献。
本文介绍了中国科大成功研发的具有19自由度仿生灵巧手的高科技机器人手部装置,这一技术的突破为机器人领域带来了革命性的变革,具有广泛的应用前景,通过详细的介绍和分析,我们了解了这一研发成果的背景、特点、技术原理、应用案例及前景展望,相信在不久的将来,仿生灵巧手将在更多领域得到应用,为人类的生产和生活带来更多便利。
 沪ICP备19034891号-1
沪ICP备19034891号-1